

The increasing popularity of autonomous vehicles led to the development of driverless racing cars. Accordingly, the competitive nature of motorsport can now be combined with autonomous vehicle technology to drive innovation. However, autonomous racing presents the issue of generating speed and steering references for a non-holonomic vehicle, which move the vehicle through a racecourse as quickly as possible. To resolve this issue, successful approaches to autonomous racing have implemented a hierarchical approach by splitting the problem into global planning (by generating a high-level plan before the mission begins) and local planning (which follows the global plan while avoiding obstacles). Current approaches to local planning for autonomous racing, generally assume that a map of the obstacles is available or can be built. It is, however, difficult to simultaneously achieve the dual objective on obstacle avoidance without a map of the obstacles and following a global plan because information about the environment is high dimensional and difficult to plan with.
Background
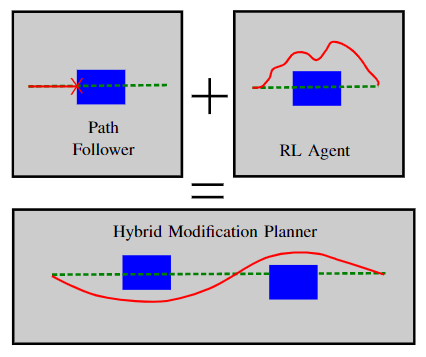
Professors Willem Jordaan and Herman Engelbrecht of the Department of Electrical and Electronic Engineering at Stellenbosch University together with their PhD student, Benjamin Evans, addressed the problem of local planning in autonomous racing without maintaining an explicit obstacle map. The authors present a novel approach to the issue: a hybrid local planner that integrates a path follower and a deep reinforcement learning (RL) agent. The RL agent modifies the steering reference generated by the path follower to accomplish the dual objective of tracking a reference path while also smoothly avoiding obstacles. This approach is referred to as a modification planner since the subsystem of obstacle avoidance by modifying the steering angle can be learnt in this way. The authors then evaluate this novel approach in the context of an F1/10th autonomous racing simulator and compare it to current approaches which include an end-to-end RL planner, the Follow the Gap Method, and an oracle optimisation-based planner.
Research results
The results show that the modification planner can learn a policy that produces faster performance than the end-to-end planner. The advantage of the approach presented in this paper, namely that it does not require a map to avoid obstacles, means it can find smoother trajectories than end-to-end approaches. Because the modification planner avoids obstacles more smoothly which results in the vehicle being able to travel at higher speeds. This shows that the modification planner achieves the behaviour that it was designed for, allowing non-holonomic vehicles to avoid obstacles smoothly at high speeds.
Read the complete research paper: Benjamin Evans, Hendrik W. Jordaan & Herman A. Engelbrecht Learning the Subsystem of Local Planning for Autonomous Racing, available at https://arxiv.org/abs/2102.11042.